王衍良, Yanliang Wang
Hi! 👏

I’m a master student of School of Mechanical Engineering and Automation at Harbin Institute of Technology, Shenzhen(HITSZ), and a member of nROS group currently. I am expectd to graduate in 2023. And I got my B.Eng. degree from Northeastern University, China in 2020.
I am Interested in Self-driving, SLAM, and motion planning, and my current research focuses on Autonomous Exploration.
Research
|
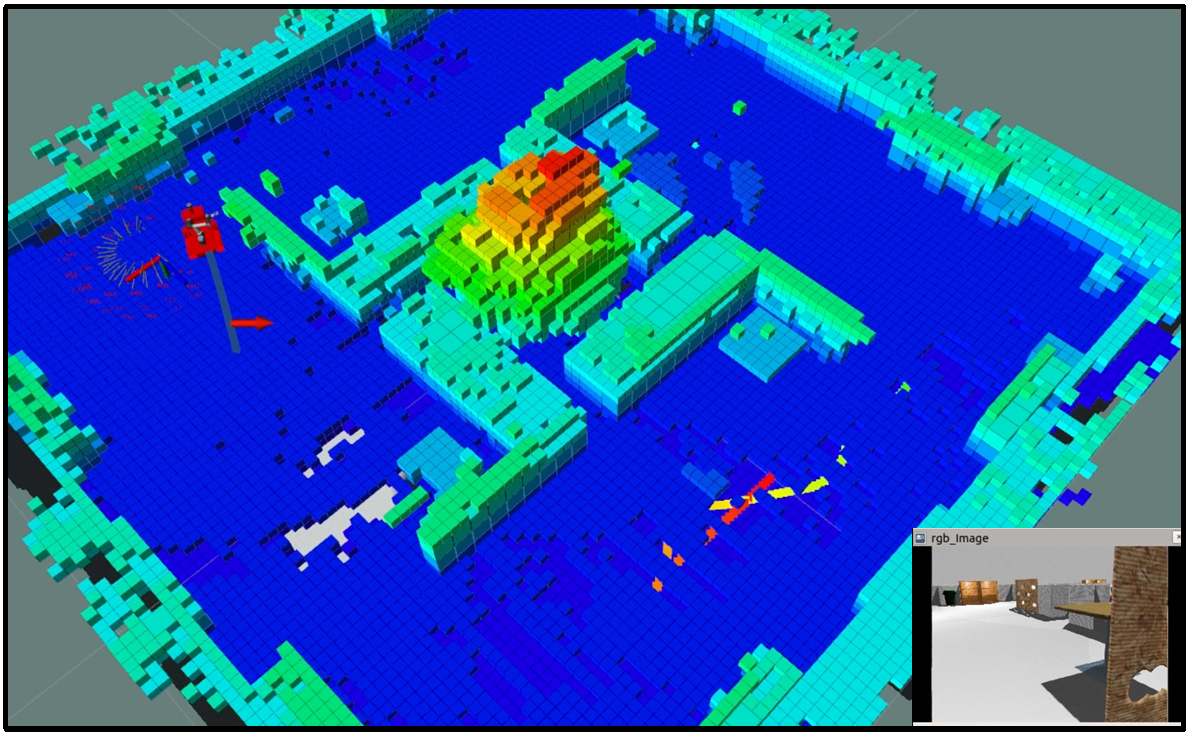
Autonomous Exploration 2021.9 ~ now This project is ongoing! |
[code] [video] |
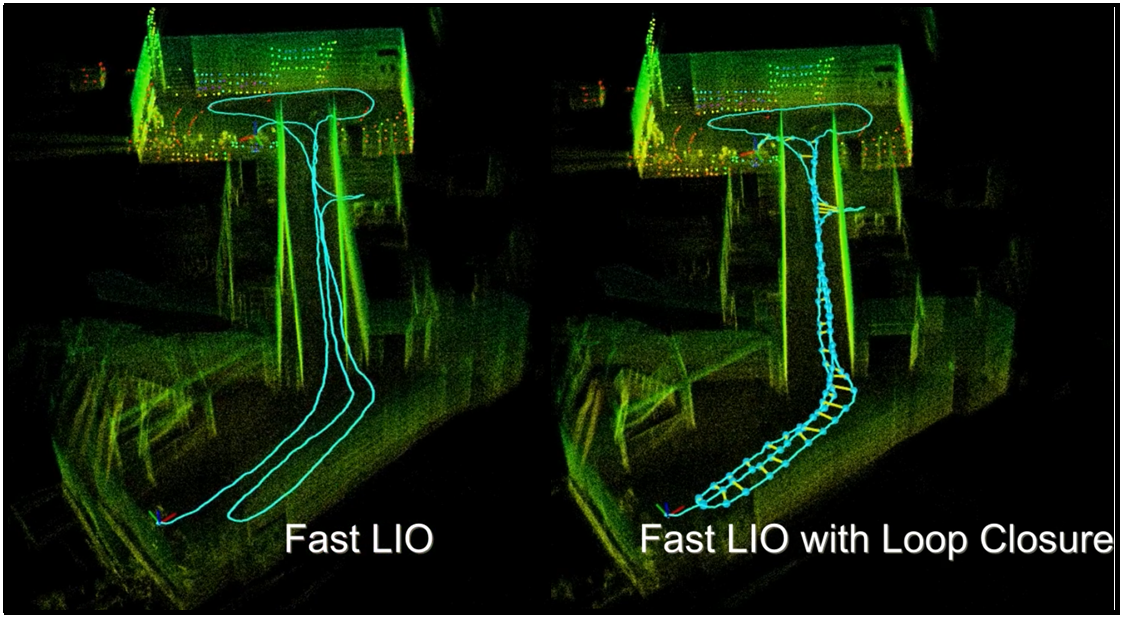
FAST LIO with a Loop Closure Module 2021.7 ~ 2021.9 FAST_LIO_LC implements the pose graph optimization with a radius-search-based loop closure on the basis of FAST LIO, which doesn't have a loop closure module to eliminate the accumulated drift. |
[code] [video] [blog] |
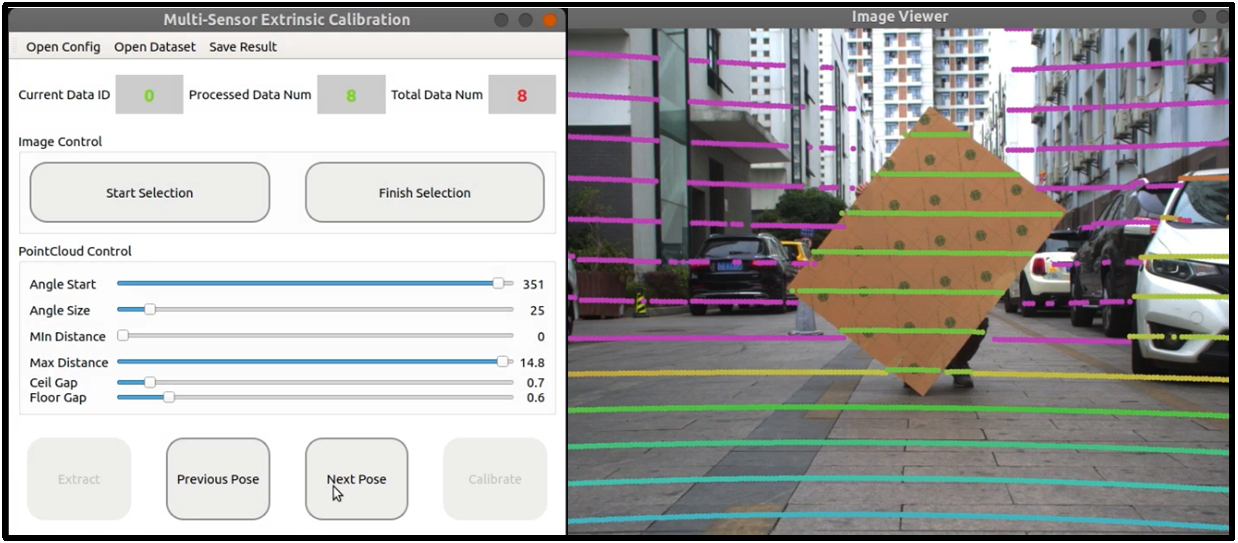
Lidar Camera Calibrator 2019.11 ~ 2020.6 lidar_camera_calibrator is a semi-automatic, high-precision, feature-based camera and LIDAR extrinsic calibration tool, which can semi-automatically calibrate high-precision extrinsic parameters and provide an interactive Qt interface with less manual intervention. |
Funny projects

[code] [video] |
Path Planning API of Amap 2018 Call the urban road path planning provided by AutoNavi Map API, and display it through RVIZ. The obtained path may be used as a coarsely global path when navigating urban roads. |
news
| Feb 9, 2022 | I released my undergraduate graduation design project, which is a convenient tool to calibrate the extrinsic paremeters between LiDAR and camera. |
|---|